SmallSat AUV网络


照片:施密特海洋研究所

照片:施密特海洋研究所

增加深度:全方位的海景。插图礼貌Kanna Rajan教授

增加深度:全方位的海景。插图礼貌Kanna Rajan教授

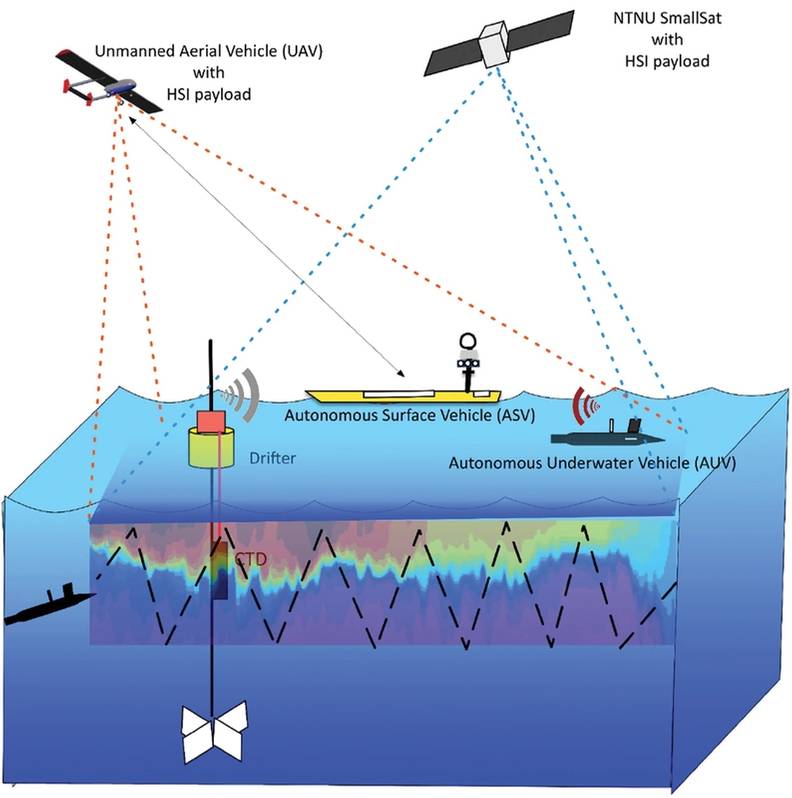
改变AUV世界:NTNU的SmallSat愿景包括海洋表面的高光谱传感,地面控制的可视化以及网络化AUV的路由。图片:NTNU
除了卫星链路之外,全球网络还有更多,但坐拥远程操作的专家可以在全球范围内积累巨大的科技成果。这就是背景中发生的事情 - 来自世界各地的最优秀科学家的一个小型网络正在协调通信和机器人技术,这些技术将在自主水下航行器或AUV的网络化使用中取得突破性成就。
如果你和Kanna Rajan教授一样,他会告诉你他不是世界上最重要的“无人机”研究员,但他至少编写了两个火星任务,并建议跨大西洋的科学家网络使用AUV和卫星。 Rajan教授建议AUV网络控制专家,波尔图大学的JoãoTassoDe Figueiredo Borges De Sousa教授,如果你正在考虑AUV世界的可能性,那么他就是最佳人选。 Rajan博士隶属于葡萄牙的波尔图,他在挪威大学NTNU编写的关于他们计划使用小型卫星(或称SmallSats)来控制AUV的愿景声明中引用了大约(约50次)。 NTNU博士后,博士生和硕士生正在接近他们的SmallSat发布日,之后北海AUV将向能够将数据传输到岸上科学家长期迈出一步。 SmallSats和AUV都将拥有能够检测化学品,金属,浮游生物或进行调查工作的高光谱相机。
总部位于加利福尼亚的Rajan教授是一位资深科学家,以在NASA艾姆斯研究中心规划,执行和创建自动系统和机器人而闻名。 De Sousa教授领导着一个类似于NTNU的AUV敏锐科学家的国际网络。两者都有高度发展的AUV实验室。三个研究团体联合起来,通过微型或纳米卫星--10-100公斤或1-10公斤的小型卫星 - 控制或增强持久的AUV操作,这是现实。除了De Sousa教授的专业网络化AUVS(和其他无人机)的指挥和控制之外,希望SmallSats能够为海洋理解和海洋运营做些什么,互联网为营销和即时知识做了什么。
AUV控制
“我们的大部分工作都是联合的,战略上我们所有人(NTNU,波尔图,美国宇航局)都朝着同一个方向前进,”Rajan博士补充说,“所以这既是机构的,也是集体的。”Rajan承认从火星车转向在海上“驾驶”AUV比预期更难。 “基础设施带来了与2004年指挥罗孚和1999年深空1号太空船相关的任务。但是,在天气条件合理的船只上到达沿海地区的细节可能是苛刻的,而且不是很容易使用,大多数人都不明白......所以,是的,罗孚和AUV都是人类感官本身的延伸,但是有更多的工作涉及到海上并使事情有效。“
这就是为什么Rajan教授,De Sousa教授(我们未能联系)和他们的NTNU同事如此期待推出SmallSats:详细,长期的海洋考试。这一重点将彻底改变海洋研究。在这个重量级科学网络的网络中,AUV的局限性是众所周知的,夏威夷到香港的研究人员将证明,与航天探测器及其“深空网络基础设施”相比,与AUV进行通信更加困难。 “虽然”权力是一个重要的缺点“,但通信问题仍然使这三位研究人员在夜间保持清醒。
 AUV网络:Joao Tasso de Sousa教授乘坐施密特海洋研究所船只,Falkor。照片:施密特海洋研究所
AUV网络:Joao Tasso de Sousa教授乘坐施密特海洋研究所船只,Falkor。照片:施密特海洋研究所
葡萄牙探险家
Rajan对Tasso教授说得对:“AUV和海洋机器人技术的超级大国是我们的密友和合作者,Joao Tasso(De Sousa)。”
事实上,葡萄牙是AUV发展和研究的重要力量。除了举办两年一度的IEEE OES自主水下航行器研讨会外,该国还拥有Tasso的水下系统和技术实验室(LSTS)以及INESCTEC的研究人员。 De Sousa教授最近在他们的Falkor研究船上率领施密特海洋研究所探险队,该研究船使用多个地区和水下机器人探索海洋盐度前沿。他也被称为北约海军在AUV联合行动中的演讲。
De Sousa是同时管理多辆自动驾驶汽车的先驱,并继续致力于此。他帮助开发了商业和研究人员软件,其中包含移动设备,可轻松控制联网的AUV。虽然有一天应用可能包括大规模海洋监视,质量检查,大规模调查或大规模攻击,但海洋研究涉及AUV(和空中无人机)通过基于船舶的海洋控制器相互接触。 SmallSats可以为这些探险队提供研究人员自己的专用带宽(目前仅为NTNU)。
网络AUV需要像波士顿大学LSTS开发的开源控制软件。通过他们自己的卫星进行通信的几个AUV可以通过他们的机载嗅探有效载荷实时传递在广阔海域上发生的巨大变化的准确图像:或者他们可以通过感知,采样或拍摄SmallSats感知或看到的内容来确认。施密特研究所记录了De Sousa教授团队部署“几种自动驾驶车辆,以便在时间空间尺度上找到,跟踪和采样海洋的各种物理,化学和生物特征,这在以前的船舶或飞机研究中是不可能的”。鉴于他们自己的光谱相机,SmallSats将添加另一层实时数据。
在Schmidt旅程中,“板载AI”,Rajan与De Sousa教授共同感兴趣的领域,用于协调AUV,无人驾驶飞行器和自主水面舰艇进行“复杂的采样任务”。据说“有时”的多辆车在“联合努力”中工作,由被称为Ripples和Neptus的软件监控和控制。要做到这一点,你需要专门的带宽来满足预期的海洋数据。为此,您的AUV需要在太空中拥有自己的SmallSats。
 增加深度:全方位的海景。插图礼貌Kanna Rajan教授
增加深度:全方位的海景。插图礼貌Kanna Rajan教授
美国宇航局质量主管
进入挪威人。对某些人来说难以理解的资金,以及存储和处理大量数据的经验(如地震调查的结果)是挪威对AUV和AUV研究的贡献的一部分。
除此之外,还有越来越多的SmallSat教员,两颗AIS卫星和一些“太空”服装,其中包括一些军事关系。虽然三个“学校”的研究人员 - 波尔图,美国宇航局和新界北大 - 都是大型国际,但挪威人和他们的邀请人才将为小型卫星三人组提供空间支持。还有NTNU学生具有卫星发射经验,然后由Rajan教授监督他的综合空间和机器人经验。 Rajan被列为NTNU员工,NASA员工和波尔图大学的合伙人。他执行了美国宇航局1999年的新千年深空一体机远程代理实验(RAX),并担任2003年火星探测车队MAPGEN控制器的主要调查员 - “火星探测器”用于双流动探测器 - “任何地方运行时间最长的人工智能系统,仍然是火星上机遇号探测器的指挥“,根据NTNU的文字。他还是蒙特利水族馆研究所自治的首席研究员,他在AUV上设计,建造和部署了基于AI的嵌入式T-REX自主控制器,以及岸基支持系统!
经济高效的通讯
虽然NTNU的挪威AUV实验室准备记录在海上发射SmallSat的巨大成就,但挪威人的资金不容小觑。该财政在欧盟资金方面表现优异,并且它为挪威的AUV和海洋学研究提供了支持,这是施密特研究所为波尔图的海洋研究和其他海洋学研究人员所做的工作所做的。
“资金是海洋机器人和/或海洋科学的一个严重问题,”拉詹教授写道。 “在美国,我们有多个机构和利益相关者认为他们需要对海洋做点什么。这包括NSF,NOAA,DARPA,ONR,所有人都有相互交叉和竞争的兴趣。在挪威,情况并非如此,但(挪威研究理事会)在简化筹资过程方面做得很好。在美国不是这样。与此相比,前往太空 - 实际上只有一个切入点。这就是美国宇航局。因此,发送航天器的过程比通常出海更容易理解,更清晰,更合理(通过美国国家科学院)。
拉詹教授表示,空间机构也倾向于设计他们的车辆,同时在重复和稳健性上花费“巨额资金”。这不是挪威的SmallSats方法。在他们的SmallSats白皮书中,NTNU承认需要关注具有摄像头和遥控器的小型专用卫星,而不是在更强大但昂贵的商用卫星上要求定期带宽。无论如何投入研究,NTNU都知道该州的财政并不总是即将到来。因此,他们专注于SmallSat计划,费用在10万美元到700万美元之间。
即使是这个巨人网络,现金也是王道。然而,AUV使海洋研究的规模可以负担得起。在施密特海洋研究所的任务简报中,Joao Borges de Sousa教授写道:“我们需要开发具有前所未有的空间和时间分辨率的持续海洋研究。仅靠船只无法达到这些水平的分辨率,规模和经济可行性。“他可能已经在考虑”SmallSats“,而NASA的Rajan教授则隶属于NTNU的自主海上作战和系统中心(AMOS)和波尔图的水下系统与技术实验室。
在今年春天和2020年之间的某个时间,一个挪威发射器将发送一个SmallSat,然后使用预计将与
AUV的扩散。挪威航天中心已经监督挪威的卫星发射,包括那些设计自己的微型卫星(1千克以下)的挪威学生。 NTNU的目标是成为SmallSats的领导者,首先使用他们使用现成3D零件打印的零件和零件制造的高光谱相机。
除了NTNU,挪威近北极岛屿太空中心正准备扩大其SmallSat发射计划。据报道,国防部队Norske Nammo正在准备一种环保型微型火箭,将SmallSat带入预先定义的轨道。
 空中和水下:一系列AUV和空中无人机在施密特海洋研究所海洋前沿调查期间联网。照片:施密特海洋研究所
空中和水下:一系列AUV和空中无人机在施密特海洋研究所海洋前沿调查期间联网。照片:施密特海洋研究所




")

在阿拉伯海执行封锁任务。(美国海军照片)")




