与Oceanering ROV部门高级副总裁Martin McDonald一对一

海洋国际公司ROV部门高级副总裁Martin McDonald。由Oceaneering International提供

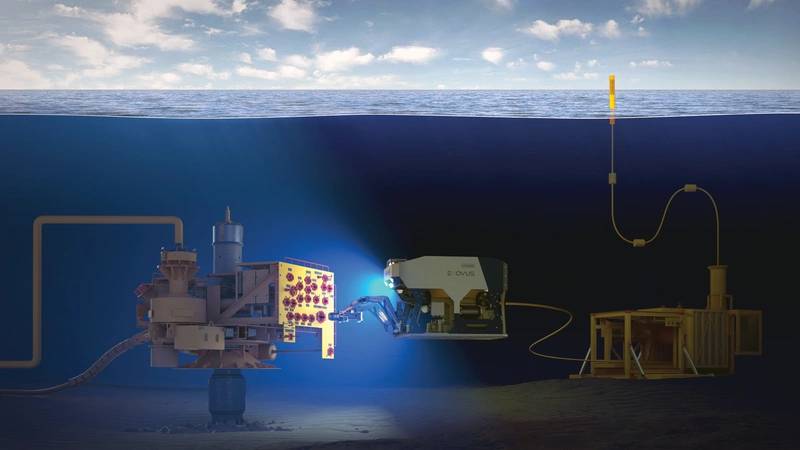
Oceaneering的Freedom车辆检查水下采油树。由Oceaneering International提供

Oceaneering的ROV系列包括下一代车辆Freedom和E-ROV。由Oceaneering International提供
Martin McDonald是一位拥有超过35年经验的行业资深人士,负责Oceaneering的全球ROV业务。凭借广泛的ROV经验 - 从运营到维修,再到维护再到管理 - 麦当劳与MTR分享了他对这个备受瞩目的海底领域的历史发展和未来前景的见解。
您是如何以及何时知道您的职业生涯将在海事/海底行业?
我在苏格兰弗雷泽堡长大,这是一个位于油田城市阿伯丁以北40英里的小镇。弗雷泽堡以商业捕鱼而闻名。我父亲是一名造船工人,从很小的时候起,我就被海运业所吸引,所以无论是商业捕鱼还是油田。我选择了油田,特别是海底工业。我在大学学习电气和电子工程,并开始在海底建筑和潜水公司工作,担任水文测量工程师,负责定位和导航设备。该公司还有一小批ROV(当时)是一种新兴技术。我对这项技术以及ROV可能涉及的各种工作范围以及它们必须进一步发展的潜力感兴趣。后来我转到全职工作ROV及其相关的传感器。
Oceaneering的名字是众所周知的,但您能否提供Oceaneering的ROV产品的尺寸和范围。
我们目前在我们的机队中拥有275个工作级ROV,这是世界上最大的工作级ROV车队,我们运营着60个观察级ROV。 ROV部门拥有约2,400名全职人员,其中大部分(约2,000名)在该领域。随着ROV每天潜水,我们在不同的持续时间和强度的一年内执行超过100,000次任务。
(近海能源)的低迷自然降低了活动水平,而且,与其他市场(船只和钻井平台)一样,我们的退休单位已经到了工作生涯的终点。我们的机队数量在2014年达到了318个工作级ROV。虽然我们已经取消了ROV,但我们也在增加单位,因此,净网,我们现在处于275(工作级)ROV。
当您添加单位时,是否有一项最重要的特定技术?
是的,当我们添加单位时,我们将使用最新技术升级它们,例如最新的控制系统,导航传感器,软件,泵送包和干预设备。
看工作班,检查班和观察班车,是否还有需要填补的产品缺口?
我们发现了市场上的一些差距。随着我们前进,自主性,远程操作,速度和可靠性都将发挥作用。机会来自降低客户的开发成本。我们看到更多的远程和自主运营符合行业重点,即减少人员风险并在工地减少碳排放。
此外,还需要更专业的设备。如今,ROV正在越来越复杂的工作范围以及具有高电流,低能见度区域的恶劣浅水环境中工作,因此必须拥有具有高规格和可靠干预能力的高功率装置。能够有效地在边境石油和天然气以及可再生能源部门的各种环境条件下工作。通过将远程操作,自主权和海底居住(通过驻留ROV)引入市场,我们看到了增强服务的机会。
 千年ROV从水中恢复过来。由Oceaneering International提供
千年ROV从水中恢复过来。由Oceaneering International提供
Oceaneering如何努力填补这些空白?
我们拥有一支专注于技术和新产品开发的强大团队,致力于我们的下一代车辆,包括驻留,机器人和自主功能。我们现在正在开发这项技术,我们期望在2019年第三季度试用我们的下一代汽车。
最近,我们在墨西哥湾进行了远程操作和自动对接的演示,在那里我们从休斯顿的运营中心远程驾驶ROV,该ROV驻扎在钻井平台上,同时还执行自动对接功能。远程驾驶技术日趋成熟,目前在北海运营,我们在那里签订了许多合同。我们正在挪威斯塔万格的任务支持中心远程驾驶ROV。该中心使我们能够通过陆上作业补充海上ROV业务。同样熟练的飞行员在离岸和陆上位置之间轮流工作,这是一种新的工作方式。
为实现这一目标,我们的设备必须可靠。我们正在投入大量的能源和资源来提高系统可靠性以及部件和材料资质,以便今天的ROV可以成为可以远程控制并以最小到零维护运行的常驻海底车辆。
您认为什么是最重要的技术或技术趋势,使ROV更高效,更具成本效益?
软件和控制系统 - 两者齐头并进。它们使我们能够优化ROV电源管理系统,以及导航,站点保持,操纵器任务,传感器,干预工具和系统诊断,从而提高性能和效率。持续的软件和控制系统开发是实现海底居住和自主干预的关键组成部分。
还有机器学习和机器视觉。正如我之前提到的,我们一直致力于自动操作,例如自动对接,ROV飞行员可以通过在屏幕上移动光标来指导ROV自动移动到停靠点,而无需操纵杆上的任何干预。机器视觉识别软件与控制和惯性导航系统相结合,使其能够始终如一地执行这些任务。这仍然是一项新兴技术,需要一点时间自动停靠。今天的现实是,一个非常好的飞行员可以更快地做到这一点,但不一定一致和反复。该技术正在发展,但我预计在不久的将来,自动对接和干预操作将变得更快,更一致,从而提供更高效和可靠的操作。
ROV的遥测,控制系统和通信链路也有很长的路要走。更快的通信和可靠的遥测,控制系统和软件改进使我们能够到达今天的位置,并帮助我们到达目的地。
Oceaneering是否在内部开发其软件和控制系统?
这是Oceaneering的关键区别:我们拥有自己的内部软件开发团队。我们所有的控制软件都是由我们的工程师工程师开发的,我们目前正在开发运行下一代ROV和自主水下航行器(AUV)的高级软件。我们现有的车队运行在我们自己的软件和控制系统上,我希望我们未来的车辆将运行在我们的下一代软件和控制系统上。我们目前没有外包任何这种发展;但是,我们不反对与具有独特技能的其他公司合作或合作。我们总是开放和关注,但是,现在,我们已经计划了自己的发展。
当今推动ROV设计和开发的主流技术趋势是什么?您需要这些车辆做什么他们目前无法做到的?
电动ROV以居住和自主为主题已经存在了很长时间,但电气系统和电池技术的不断进步将是一个非常重要的推动因素,可以增加范围,耐用性和更复杂的自主操作 - 最终导致表面船舶天数减少。如果我们的客户可以使用更少的船舶天来支持他们的现场开发,运营和维护,那么我们将降低总体拥有成本并开辟新的机会。
强大的通信系统是另一个重要需求 - 几年前北海不存在4G网络,现在覆盖率接近100%。很快4G网络将来到墨西哥湾。通信网络正在向这些领域扩展,卫星技术的改进也在不断扩展。增加这两项是海底无线技术的进步。这三个组成部分将为自治和远程操作开辟一个新的战区。
 Oceaneering的E-ROV车辆。由Oceaneering International提供
Oceaneering的E-ROV车辆。由Oceaneering International提供
实时数据处理和海底成像是另一个重要领域 - 将摄像机和传感器集成到ROV,以提供直接与陆上工程师通信的结构的实时3D成像,以便他们可以快速做出资产完整性决策。图像还可以构建到虚拟现实环境中,有效地数字化场地并增强海底导航。传统方法使用声纳和声学导航,但虚拟现实在这里并且变得更加先进。随着我们前进,我们将建立特定领域和其他位置的3D图像。虚拟现实在表面上使用,其功能正在海底扩展。我们目前正在开展一个实时增强海底3D成像能力的项目。您删除了数据处理,以便立即完成处理。历史上一直在寻找异常情况进行后处理,这会花费时间并涉及额外的船只天数和人员天数。如果它可以在工地上实时完成,那么它将更有效,当然也更具成本效益。
您最希望看到的ROV(车辆,控制元件或配件)的演变或改进是什么?
它是液压和电力推进系统之间的平衡。我们将看到电动操纵器发挥作用,减少对液压系统的依赖。今天的ROV仍然需要一些重型泵送和干预能力,因此这是使全电动系统与液压系统之间的挑战。例如,今天,电动操纵器提供的液压操纵器的提升能力和效率不到50%。
我们专门谈论ROV,但ROV系统的关键组件是深水脐带的处理系统和可靠性。 Oceaneering已投入大量资金用于脐带设计和维护的研发(R&D)。因此,我们能够实施更好的维护计划,从而提高预期寿命,降低维护成本,并提高我们的脐带和处理系统的预期寿命。在自动化领域,我们最终也看到了自动化的启动和恢复系统。
当你看今天的市场时,你看到了什么?你在哪里看到机会?
我前面提到的主题存在机会。在长期低迷时期,我们受到了与其他所有人一样的影响。我们是一个更精简,更高效的组织。我们在全球范围内具有重要的地理分布。我们的机会在于与客户合作,不仅降低了现场开发的成本,还降低了各自领域的运营成本。我们正在设计下一代车辆以参与这些主题:自治和远程操作,驻留和这些系统的可靠性。
我们的行业发生了结构性变化。我们生活在低油价环境中,这是新常态。我们正在设计我们的系统和服务,以便在这个低油价环境中实现盈利和可持续发展。
这次海上能源萧条对Oceaneering ROV装置的影响如何?今天与四年前有什么不同?
我们今天是一个更精简的组织,将整合的团队和支持功能结合在一起。我们效率更高,并且我们在全球范围内保持战略位置。拥有专门的安装组只处理系统的安装,重新激活和复员对我们的业务非常重要。今天,在经济衰退之前,我们只有不到50%的在岸支持小组,但我们仍然有效地为我们的客户和业务提供服务。通过实施卓越运营计划,我们已经能够在全球范围内简化运营。
有一次,在经济衰退之前,我们大约每周生产一次ROV。然而,市场上存在产能过剩,因此我们将注意力转向翻新和升级现有设备。我们不是建造新的ROV,而是通过引入尖端技术来改进我们现有的车队并推进它们。
我们在动员和复员活动方面也变得更加有效。在经济衰退之前,我们将动员ROV进行为期两年或三年的合同。新的现实看到的是短期合同,例如,三周和三个月的合同很常见。我们还花了很多时间来改进我们的安装和重新激活过程。
我们将资本投资和研发投入集中在选择性项目上,正如我之前所说,我们正在倾听客户的意见,因此我们相信我们正朝着正确的方向前进。我们有一个为期五年的技术路线图,将在此期间推出。第一个成功是我们自给自足,电池供电的E-ROV合同奖。这个概念引起了很多行业的兴趣,我们看到E-ROV近期在现场和钻井支持方面有更多的机会。到2019年和2020年,我们将从我们的产品组合中推出更多技术进步。
请深入讨论您认为最能体现ROV装置功能的案例研究。
我们获得了北海一家主要运营商的合同,以部署我们常驻车辆的第一个版本E-ROV,代表“Empowered ROV”.E-ROV是一个驻留的电池供电ROV,用水面浮标去海底。它是一种带有液压动力单元的工作级电动车,用于支持其机械手功能,它可以通过我们的陆上任务支持中心远程控制,通过4G宽带网络进行通信,使用自我部署的浮标。我们为这一成就感到自豪。在初始范围之后,我们已经获得了一份为期三年的合同,其中包含来自同一客户的选项,其中E-ROV将部署在多个地点和工作范围内,服务于多个领域。 E-ROV可以通过具有自行部署浮标的机会船舶放置在海底的特定位置,并且可以通过机会船舶类似地回收,并在48小时内重新部署到另一个位置。
这是一项全球性的努力,开发E-ROV系统,结合Oceaneering内许多团队的专业知识。我们相信这是海底ROV驻留下一阶段的重大技术进步。我们的下一代车辆(Freedom ROV)将由海底对接站提供支持,并将具有混合功能,使其能够以两种模式运行:通过系绳远程驾驶以提供实时控制 - 或在自动和无线模式,使用电池供电。
什么是E-ROV的当前持续时间能力?
E-ROV目前是电池供电的,但它也可以连接到海底电源,以便具有无限的持续时间。目前电池供电的海底居住设计为三个月,但我们正在努力扩展它。我们的下一代车型将设计为六个月。
持续时间取决于E-ROV正在执行的干预工作范围的强度。如果它是纯粹的观察,那么它使用更少的电池电量,并将具有更长的生命周期。如果是操纵或注射防滑干预,则需要更多的电池电量,这将导致更短的工作生命周期。
你在寻找其他任何电源选项吗?
是的,我们正在探索燃料电池和动力浮标。电源浮标显然适用于有波浪作用的地方,因此它可能不适合某些良性位置。可以在选择性的现有海底生产系统上获得电力,我们正在与客户一起探索部署的机会。
其他哪些发展对海底居住最重要?
水下通信的进步至关重要。如果该技术可以完善,那么它开辟了另一种更直接的与海底车辆通信的方法。例如,今天,AUV必须重新校准并验证其位置。如果我们能够在海底和移动中做到这一点,那么这可以延长任何特定任务的持续时间和效率。
性能,可靠性和创新仍然是我们的首要任务。目前的车队性能超过99%的正常运行时间,并且在2018年获得ROV技术和创新的两个行业奖项,我们相信这些成功将继续下去。它需要专门的资源:项目规划,维护,运营支持,研发,当然还有最重要的组成部分:我们敬业且技术精湛的专业团队。





")

在阿拉伯海执行封锁任务。(美国海军照片)")



